



Denoising Tells When to Replan: Denoising-Variance Adaptive Chunking for Flow-Based Robot Policies
last denoising step들에서 clean-action estimate들의 variance를 future action별 stability proxy로 사용해, 안정적인 action prefix만 실행하고 고분산 구간 전에 replan
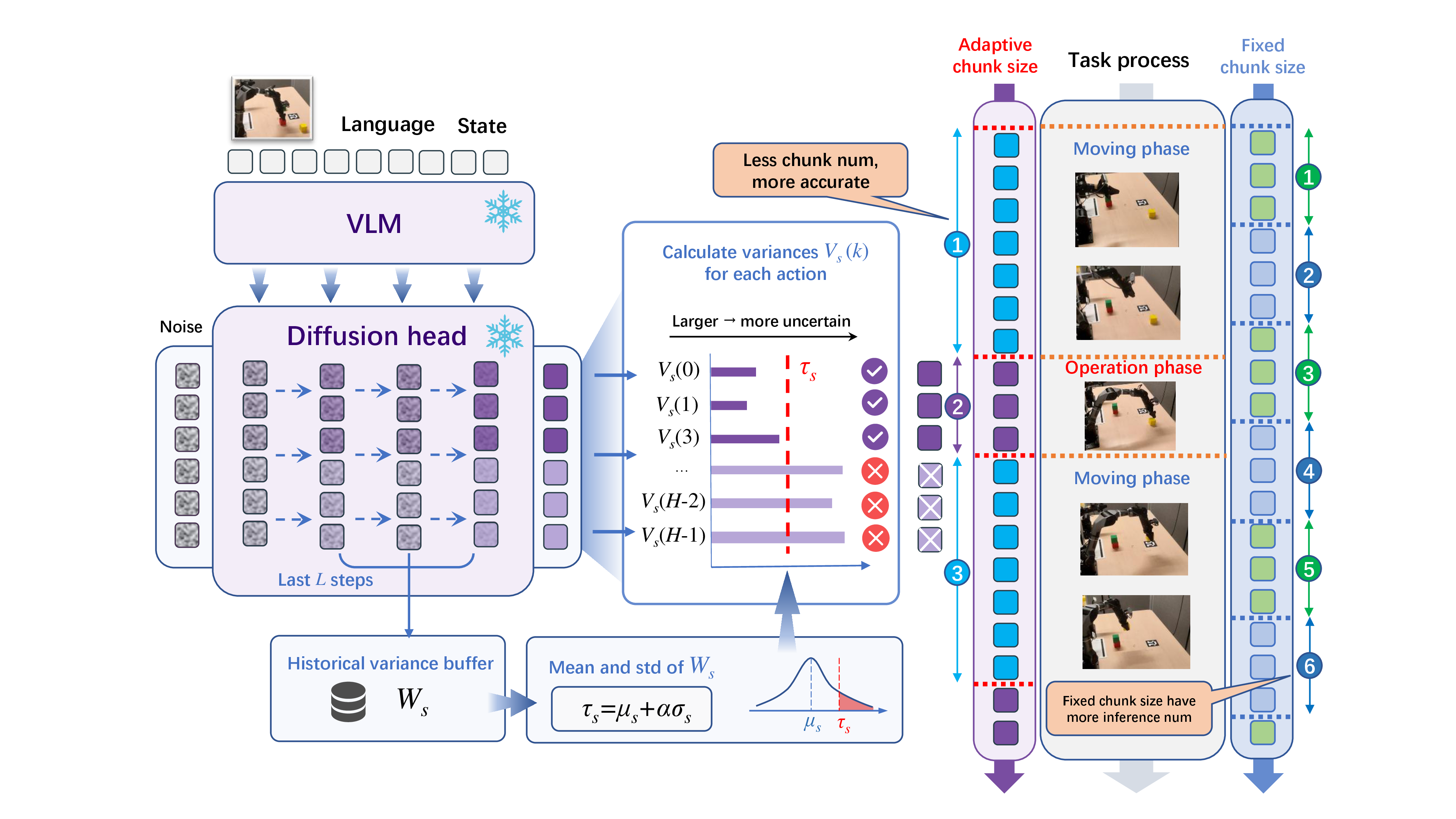
Overview Figure
Summary
- 기존 action chunking은 fixed execution horizon을 쓰기 때문에, free-space motion에서는 너무 자주 replan하고 contact/precision phase에서는 너무 긴 open-loop horizon로 실행할 수 있다.
- DVAC는 denoising 과정의 마지막 $L$ steps에서 각 future action index $k$의 clean-action estimate variance $V_{s}(k)$를 계산하고, rolling statistics 기반 (adaptive) threshold $\tau_s=\mu_s+\alpha\sigma_s$를 넘어가기 전 prefix만 실행한다.
- $\pi_{0.5}$ 기반 실험에서 LIBERO success를 94.8% → 98.0%로 올리고 replanning count를 32.6 → 18.6으로 줄였으며, RoboTwin, CALVIN, real-world tasks에서도 전반적인 이득을 보인다.