



ENPIRE: Agentic Robot Policy Self-Improvement in the Real World
coding agent가 실제 로봇의 reset → rollout → verification → policy/code refinement research loop를 직접 운영하고, 여러 robot–agent worker가 Git으로 실험 지식을 공유하면서 task policy를 자동 개선하게 만든 physical autoresearch harness
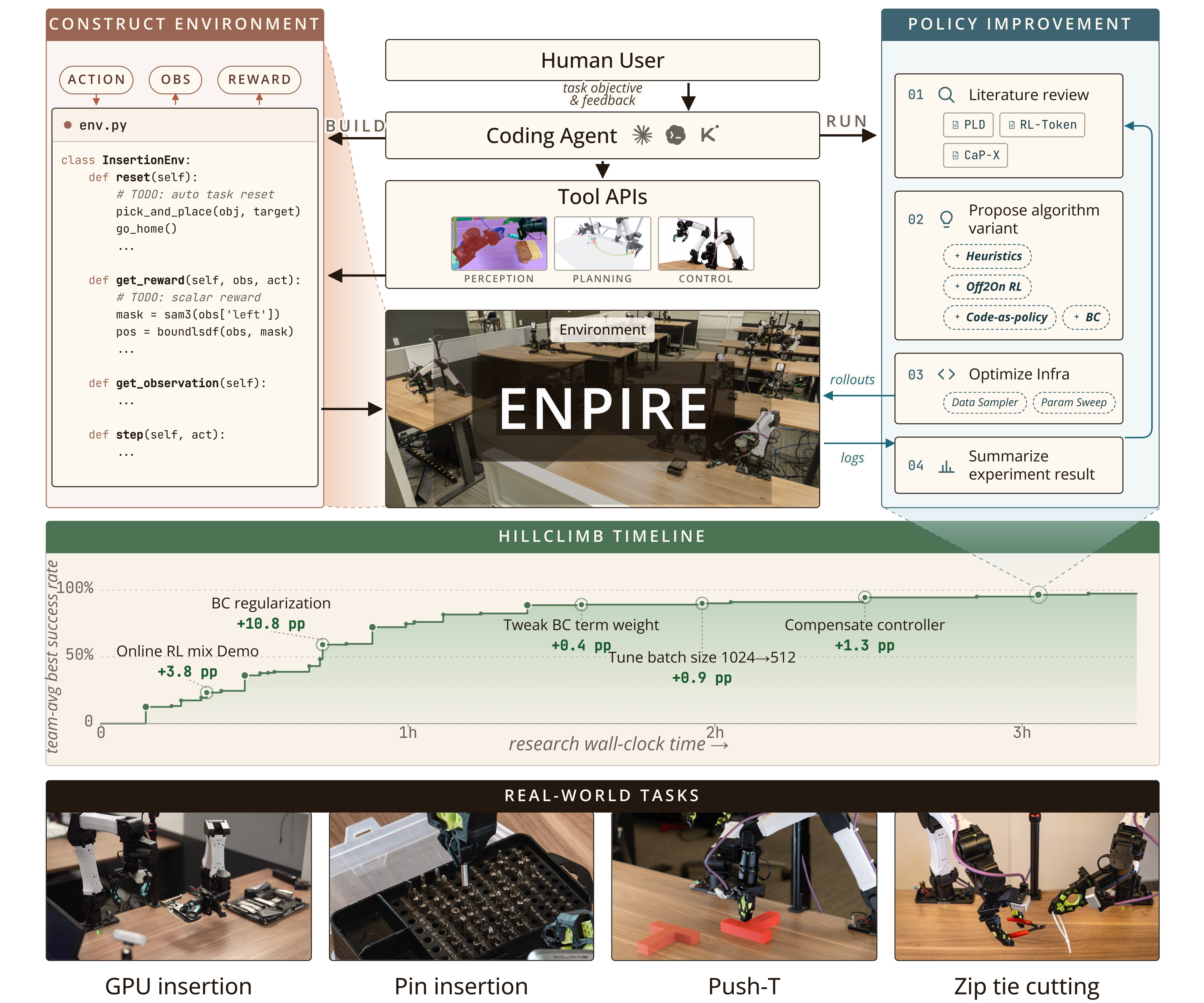
Overview Figure
Summary
- 기존 real-world robot learning은 demonstration 수집, 실패 판정, 환경 reset, algorithm tuning까지 상당한 human supervision이 필요해 scale-up의 병목이 된다.
- ENPIRE는 coding agent가 실제 로봇을 대상으로 반복 가능한 physical hypothesis-testing loop를 운영하게 만드는 것을 목표로 한다.
- 핵심 아이디어는 먼저 human feedback으로 safety constraints·automatic reset·binary verifier를 포함한 environment API를 만들고 고정한 뒤, coding agent가 그 API를 통해 policy algorithm과 training recipe를 자율적으로 수정하는 것이다.
- 시스템은 Environment, Policy Improvement, Rollout, Evolution의 네 모듈로 구성되며, 여러 robot–agent pair가 서로 다른 가설을 비동기적으로 시험하고 Git을 통해 성공적인 변경을 공유한다.
- 저자들은 Push-T, pin insertion, GPU insertion, zip-tie cutting에서 높은 성공률과 fleet scaling에 따른 wall-clock time 감소를 보였지만, 더 많은 agent를 사용할수록 robot utilization은 낮아지고 token 비용은 super-linear하게 증가한다.
Further Analysis
- 이 논문의 핵심 novelty는 새 policy architecture가 아니라, robot policy research process 전체를 executable closed loop로 바꾼 것이다.
- 일반적인 VLA 논문이 $(\text{image, language, state}) \rightarrow \text{action}$ 을 개선한다면, ENPIRE는 더 바깥쪽의 $\text{task specification} \rightarrow \text{experiment design} \rightarrow \text{training} \rightarrow \text{real rollout} \rightarrow \text{analysis} \rightarrow \text{code update}$를 자동화한다.
- 가장 중요한 engineering contribution은 policy보다 environment interface다. 실제 세계에서는 성공 판정과 reset이 자동화되지 않으면 아무리 좋은 coding agent도 반복 실험을 진행할 수 없다.
- “Autonomous”라는 표현은 Stage 1 이후에 한정해 이해해야 한다. 초기 safety boundary 설정, 몇 분 분량의 success/failure examples, human critique은 직접 정해줘야 한다.
- 실험에서 큰 성능 향상은 새로운 learning algorithm보다는 BC regularization, demo mixing, batch size, controller compensation 같은 known recipe를 올바르게 조합한 결과에 가깝다.
- 따라서 이 논문은 “AI가 새로운 robot learning theory를 발견했다”기보다, AI가 real-world robotics engineer의 반복 실험 업무를 상당 부분 수행할 수 있다는 실증으로 보는 것이 정확하다.