



VLAMotor: Test-Guided Enhancement of Vision-Language-Action Models via Agent-Based Data Synthesis
training distribution에서 멀고 서로 중복되지 않는 테스트 케이스로 VLA 실패를 적극적으로 찾고, 그 실패 trajectory를 VLM agent가 성공 trajectory로 고쳐 fine-tuning data로 쓰는 failure-driven VLA enhancement framework
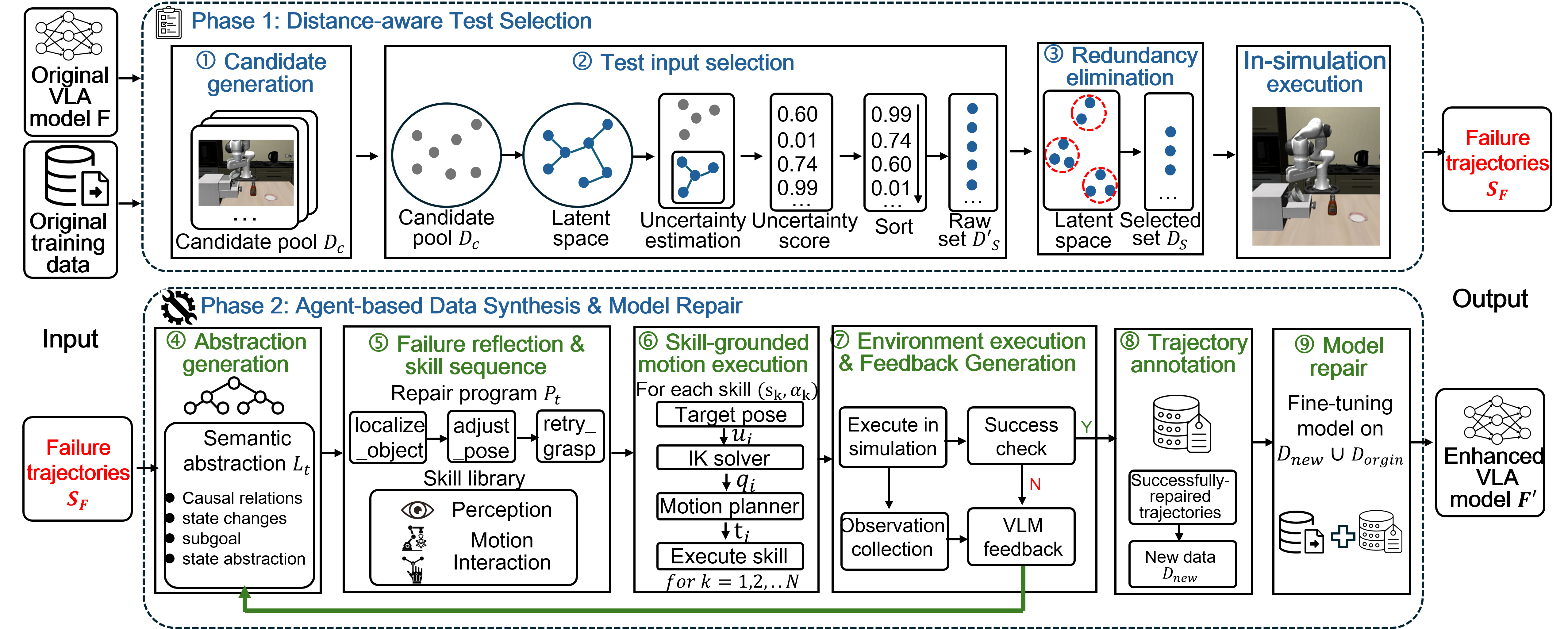
Overview Figure
Summary
- VLA는 training data coverage 밖의 edge-case에서 자주 실패하므로, VLAMotor는 fused hidden state 기준으로 training sample과의 distance가 크고 uncertainty가 높은 test case를 우선 선택하고, redundancy elimination으로 서로 중복되는 실패 케이스를 줄인다.
- 선택된 failure trajectory는 VLM-based agent가 semantic abstraction으로 해석하고, perception/motion/interaction repair skill sequence로 바꾼 뒤 IK와 motion planning으로 실행 가능한 성공 trajectory를 만든다.
- 이렇게 자동 생성된 성공 trajectory를 원래 data와 합쳐 fine-tuning하면 simulation에서 전체 success rate가 49.25%p 개선되고, real-world Franka 실험에서도 π0.5가 0/80에서 46/80 성공으로 개선된다.