



PACE: Phase-Aware Chunk Execution for Robot Policies with Action Chunking
action chunking robot policy에서 고정 execution horizon 대신, predicted action chunk의 low-speed valley를 phase boundary로 사용해 매 query마다 실행 길이를 동적으로 선택하는 training-free test-time execution 방법
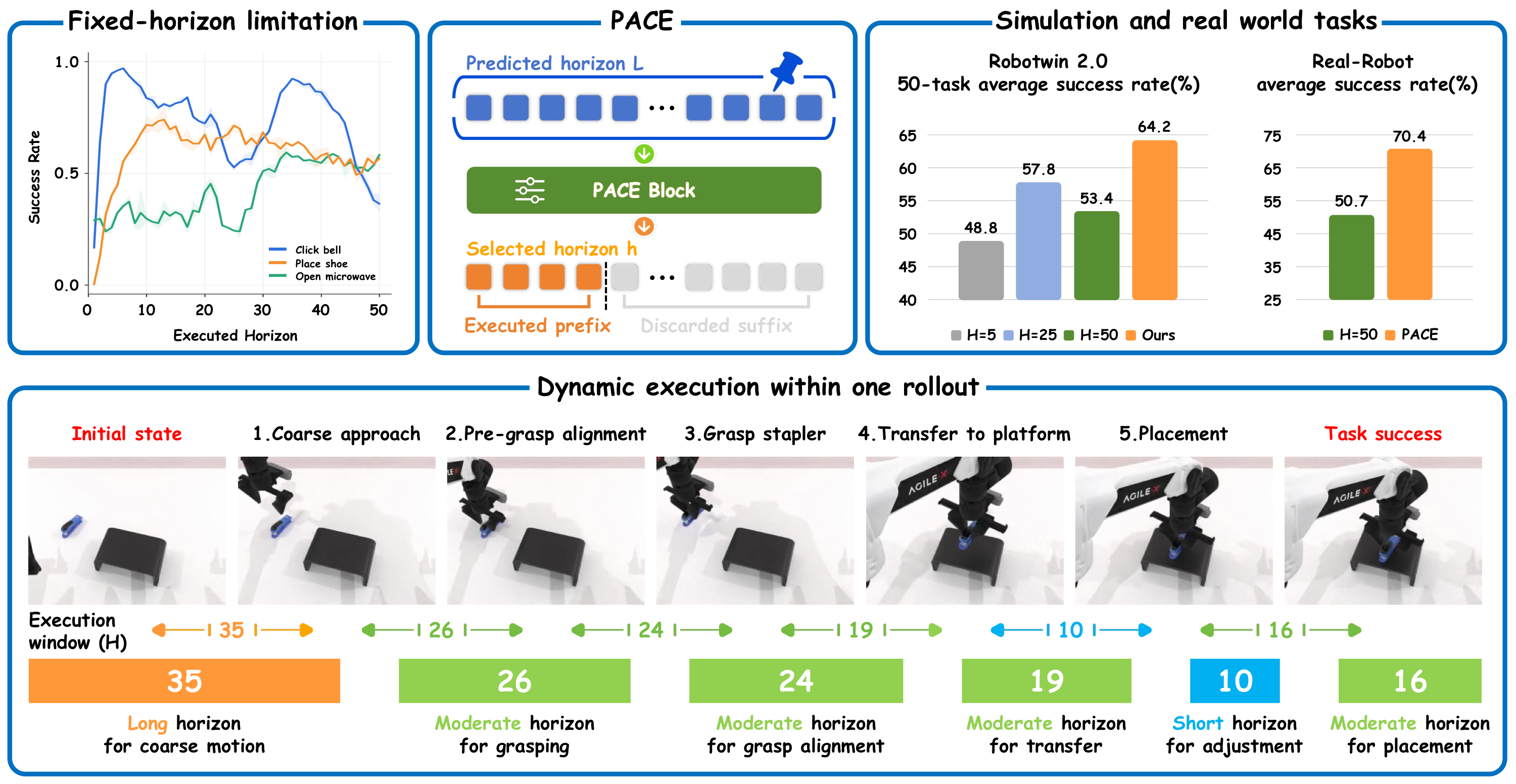
Overview Figure
Summary
- 기존 Diffusion Policy, VLA 계열의 action chunking은 한 번 query할 때 여러 future action을 예측하지만, 그중 몇 step을 실제로 실행할지는 보통 고정 horizon
H로 정한다. - 논문은 이
H가 task-dependent하고 non-monotonic해서, 하나의 고정값으로는 안정적인 deployment rule이 되기 어렵다는 점을 보인다. - PACE는 predicted action chunk의 smoothed speed profile에서 low-speed valley를 phase boundary로 검출해 그 지점까지의 prefix만 실행하여 simulation 및 real-robot에서 고정 horizon보다 높은 성공률을 얻는다.