



Continuous Reasoning for Vision-Language-Action
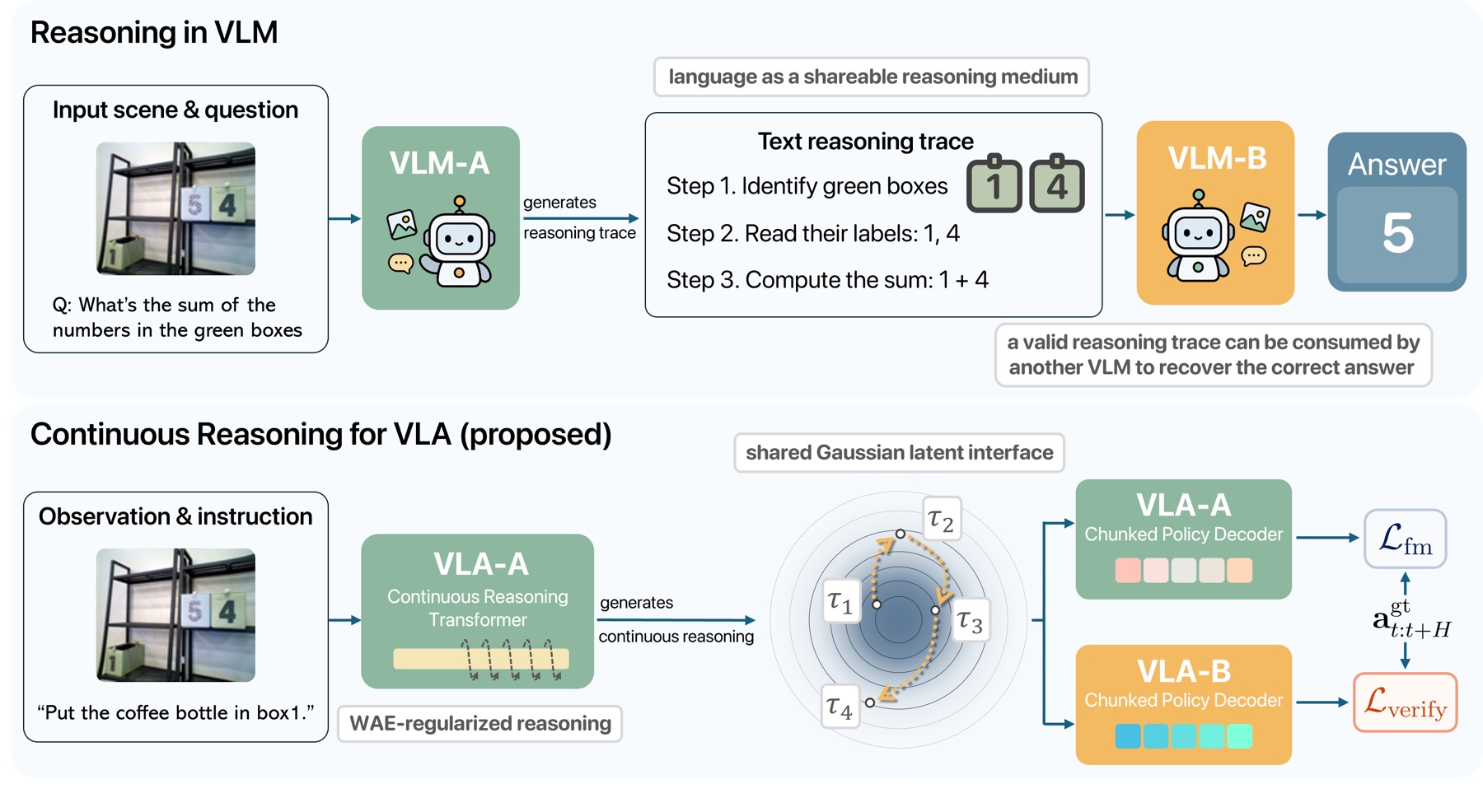
VLA의 reasoning을 자연어 CoT가 아니라, 다른 VLA instance도 consume할 수 있는 WAE-regularized Gaussian continuous reasoning interface로 정의
Overview Figure
Summary
- 기존 language/text CoT는 task-level reasoning에는 좋지만, robot action은 훨씬 더 fine-grained continuous control이므로 시간 granularity가 맞지 않는다.
- 이 논문은 observation/instruction에서 continuous thought를 만들고, 이를 WAE(Wasserstein autoencoder)-regularized Gaussian latent space로 정규화한 뒤, chunked flow-matching action generation의 shared reasoning context로 사용한다.
- EMA teacher가 student의 latent thought를 consume해서 target action field를 예측하도록 self-verification objective를 넣었고, LIBERO-PRO와 TX-G2/HSR 실로봇에서 특히 spatial retargeting과 task adaptation이 개선된다.